

摘 要:有人/无人机协同将成为无人平台在未来战场运用的新常态。随着武器装备的智能化、自主化水平不断提高,人与机器之间的任务剖分会发生明显改变,人会逐渐把大量重复且确定的工作交给机器完成,而自己只参与重要决策环节。有人/无人机协同作战是分布式协同作战理念指导下应用较为广泛的典型作战模式,通过有人平台和无人机之间分工协作,形成优势互补,达到“1+1>2”的作战效果。本文对近些年美军在有人/无人机协同领域的项目进行深入分析,总结了有人/无人机协同需要发展的关键技术,并对有人/无人机协同作战的典型作战场景和作战流程进行研究,提出对有人/无人机协同作战领域未来发展的思考。
关键词: 有人/无人协同;无人机
引 言
有人/无人机协同作战是将体系能力分散到有人和无人平台之上,通过体系内各平台之间的协同工作,一方面使作战能力倍增,另一方面利用无人机实现对有人机的保护,大幅提高体系的抗毁伤能力和鲁棒性。有人/无人协同作战能够实现有人和无人平台之间的优势互补,分工协作,充分发挥各自平台能力,形成“1+1>2”的效果。有人机与无人机在空中作战将长期保持控制与被控制的关系[1],随着无人智能化水平的不断发展,有人机与无人机协同作战样式、协同形态和相关技术也在不断演进。因此,发展有人/无人机协同编队提高作战效能是现阶段的明智选择。
本文主要研究美军在有人/无人机协同领域的项目和技术突破情况,给出对于有人/无人机未来发展的思考。本文组织结构如下:第1章对美军近些年在有人/无人机协同方向典型项目进行重点分析;第2章主要介绍了有人/无人机协同的关键技术;第3章是有人/无人机典型作战场景和场景模式;第4章是对有人/无人协同未来发展方向的展望;最后对本文进行总结。
1 美军有人/无人机协同发展现状分析
美军将有人/无人协同列为“第三次抵消战略”五大关键技术领域之一。有人/无人协同概念最早出现于上世纪60年代,指有人与无人系统之间为实现共同作战任务目标建立起联系,用于描述平台互用性和共享资产控制。近些年,DARPA及各军兵种在有人/无人机协同领域开展了大量研究工作,主要从体系架构、指挥控制、通信组网以及人机交互四个方面重点发展。
1.1 体系架构
为了探索确保美国空中优势的新方法,2014年,DARPA发布体系集成技术和试验(SoSITE)项目公告。该项目目标是探索一种更新、更灵活的方式,将单个武器系统的能力分散到多个有人与无人平台、武器上,寻求开发并实现用于新技术快速集成的系统架构概念,无需对现有能力、系统或体系进行大规模重新设计。SoSITE项目计划运用开放式系统架构方法,开发可无缝安装、即装即用,并能快速完成现代化升级的、可互换的模块和平台,使得新技术的集成整合更容易、更快速。如图1所示,通过开放式系统架构方法实现空中平台关键功能在各类有人/无人平台间的分配,包括电子战、传感器、武器系统、作战管理、定位导航与授时以及数据/通信链等功能。
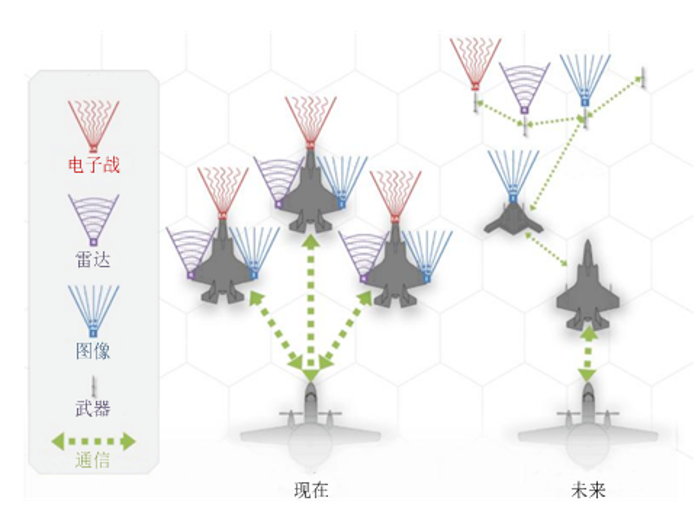
图1 SoSITE概念图
2017年,美军在SoSITE分布式发展思路的基础上,进一步提出了“马赛克战”的概念,更加强调不同平台之间动态协同,从平台和关键子系统的集成转变为战斗网络的连接、命令与控制。通过将各类传感器、指挥控制系统、武器系统等比作“马赛克碎片”,通过通信网络将各个碎片之间进行铰链,形成一个灵活机动的作战体系,解决传统装备研发和维护成本高、研制周期长的问题。
1.2 指挥控制
针对有人/无人机协同的指挥控制,美军重点研究强对抗/干扰环境下的有人机与无人机协作执行任务的方法,形成分布式的指控管理能力。
2014年,DARPA提出“拒止环境中协同作战”(CODE)项目。“CODE”的目标是使配备“CODE”软件的无人机群在一名有人平台上任务指挥官的全权监管下,按照既定交战规则导航到目的地,协作执行寻找、跟踪、识别和打击目标的任务[2,3]。CODE项目通过开发先进算法和软件,探索分布式作战中无人机的自主和协同技术,扩展美军现有无人机系统在对抗/拒止作战空间与地面、海上高机动目标展开动态远程交战的能力。
CODE项目分为三个阶段,
第一阶段从2014年到2016年年初,内容包括系统分析、架构设计和发展关键技术,完成系统需求定义和初步系统设计;
第二阶段从2016年年初到2017年年中,洛马和雷神公司以RQ-23“虎鲨”无人机为测试平台,加装相关软硬件,并开展了大量飞行试验,验证了开发式架构、自主协同规划等指标;
第三阶段从2018年1月开始,测试使用6架真实无人机以及模拟飞机的协同能力,实现单人指挥无人机小组完成复杂任务。
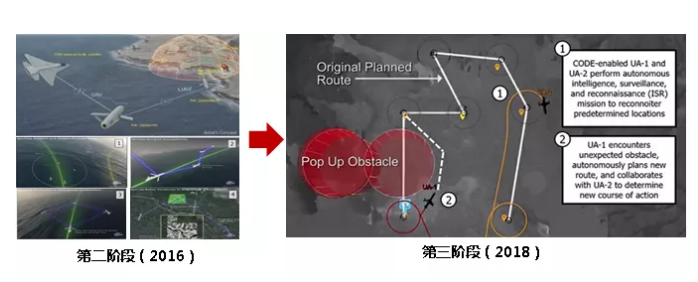
图2 “拒止环境中协同作战”项目
2014年,DARPA提出“分布式战场管理”(DBM)项目。项目背景是未来的对抗性空域,协同作战的飞机可能需要限制通信以免被对手发现,或者会被对方干扰而无法交换信息,这将严重影响有人/无人编队作战能力,为此,DBM项目的目标是使作战编队即使在受到干扰的情况下也能继续执行任务。
2014年启动第一阶段,通过发展先进算法和软件,提高分布式空战任务自适应规划和态势感知等能力,帮助履行战场管理任务的飞行员进行快速且合理的决策,以在强对抗环境下更好地执行复杂作战任务。
2016年5月,DARPA向洛马公司授予1620万美元的项目第二阶段合同,设计全功能决策辅助软件原型,帮助策划有人机和无人机参与的复杂空战。
2018年1月,DARPA已向BAE系统公司授予DBM项目第三阶段合同,前两阶段发展的成果能让有人/无人机编组在干扰环境中飞行,具备回避威胁和攻击目标的能力。图3是DBM项目的能力验证环境。
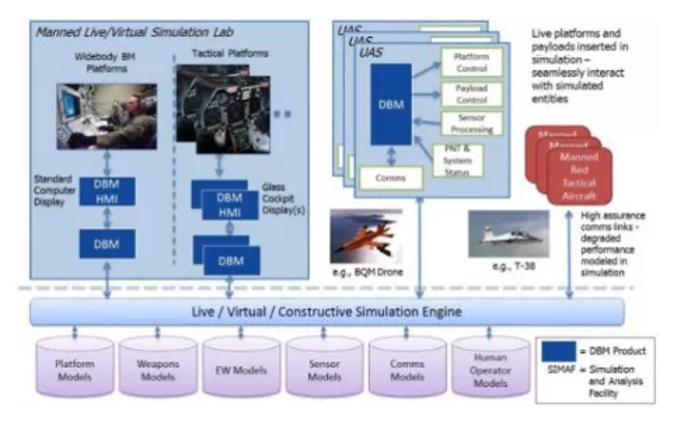
图3 “分布式作战管理”能力验证环境
1.3 通信组网
有人平台和无人平台通过通信网络进行连接,有人/无人机协同能力形成是以平台之间的互联互通为基本前提的。协同任务一方面对通信网络的带宽、时延、抗干扰/毁伤、低探测等性能提出了新要求,另一方面通信组网应能适应传统平台的异构网络以及未来新型/改进型网络。
“中平台间的通信能力对抗环境中的通信”(C2E)项目通过发展抗干扰、难探测的通信网络技术,确保在使用相同射频和波形的飞机之间开展不受限制的通信,以应对各种频谱战威胁。
DARPA在2015年发布 “满足任务最优化的动态适应网络”(DyNAMO)项目,通过开发网络动态适应技术,保证各类航空平台在面对主动干扰时,能在一定安全等级下进行即时高速通信,C2E项目的硬件成果被用于该项目的演示验证,保证原始射频数据在目前不兼容的空基网络之间进行通信,为有人/无人机协同体系中异构平台之间的实时数据共享奠定了基础。
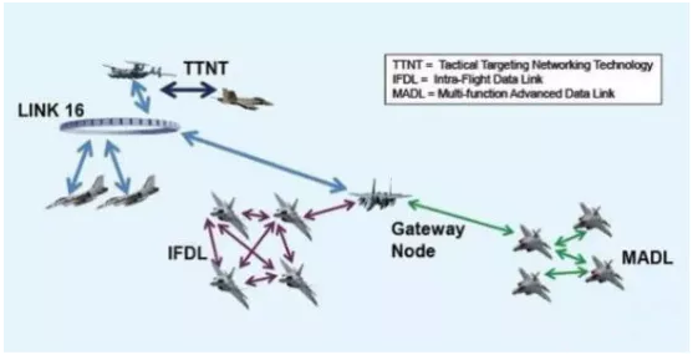
图4 美军现有主要空基网络示意图
1.4 人机交互
CODE等项目在有人/无人机协同的人机交互上也做了大量工作。此外,美军陆军于2017年完成“无人机操作最佳角色分配管理控制系统(SCORCH)”研发。如图5所示,“SCORCH”系统包含无人机的智能自主学习行为软件以及高级用户界面,提供了独特的协同整合能力,将人机交互、自主性和认知科学领域的最新技术融合到一套整体作战系统中。系统界面针对多架无人机控制进行了优化,设有具备触摸屏交互功能的玻璃座舱、一个配备专用触摸显示屏的移动式游戏型手动控制器、一个辅助型目标识别系统以及其他高级特性。“SCORCH”负责多架无人机的任务分配,并在达到关键决策点的时候向空中任务指挥者发出告警,允许单一操作者同时有效控制三个无人机系统并浏览它们传回的实时图像。
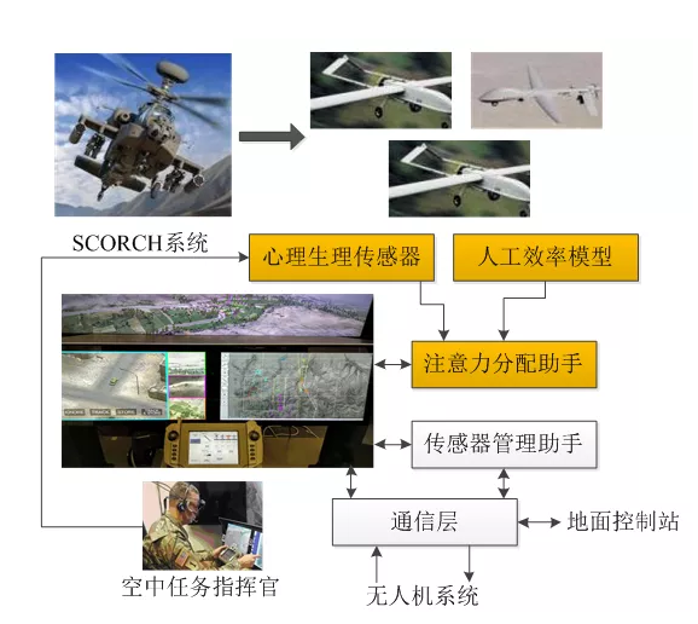
图5 无人机操作最佳角色分配管理控制系统
2 有人/无人机协同关键技术分析
2.1 开放式系统架构技术
有人/无人机协同包含多种作战平台,如果不同的作战平台上采用差异较大的技术体制,将致体系集成难度剧增。开放式系统架构正是为了解决该问题进行设计的,推动采办和商业模型远离传统烟囱式开发模式,具有可移植、模块化、解耦合、易升级、可扩展等特点,可降低寿命周期成本,缩短部署时间,获得了工业界和国防部的支持。
目前,美军具有代表性的开放式系统架构有未来机载能力环境(Future Airborne Capability Environment,FACE)和开放式任务系统(Open Mission Systems,OMS)。
美国海军提出未来机载能力环境概念,目标是建立一个公共操作环境,以支持软件在任意机载电子系统上的移植和部署。该思想受到了移动设备中使用公共操作环境所带来优势的启发。FACE通过制定一个严格的开放标准集合,采用开放式体系结构、集成式模块化航空电子系统和模块化开放系统分析方法,使航空电子系统内部应用程序之间的互操作性最大化。
未来机载能力环境(FACE联盟)成立于2010年,旨在为所有军用机载平台类型定义开放的航空电子环境。FACE技术标准是一种开放的实时标准,用于使安全关键计算操作更加健壮、可互操作更强、便携且安全。该标准的最新版本(2017年发布3.0版本)进一步提升了应用程序的互操作性和可移植性,增强了在FACE组件之间交换数据的要求,包括正式指定的数据模型,并强调定义标准的通用语言要求。通过使用标准接口,该开放标准实现了系统和组件之间的互操作性以及接口重用。图6是FACE的软件架构,共分为可移植组件单元、传输服务单元、平台特定服务单元、输入输出服务单元以及操作系统单元。
在航空电子系统中使用开放标准的标准化具有以下几个方面的优势:(1)降低FACE系统开发和实施成本(2)使用标准接口将导致功能的重用(3)跨多个FACE系统和供应商的应用程序的可移植性(4)采购符合FACE标准的产品。 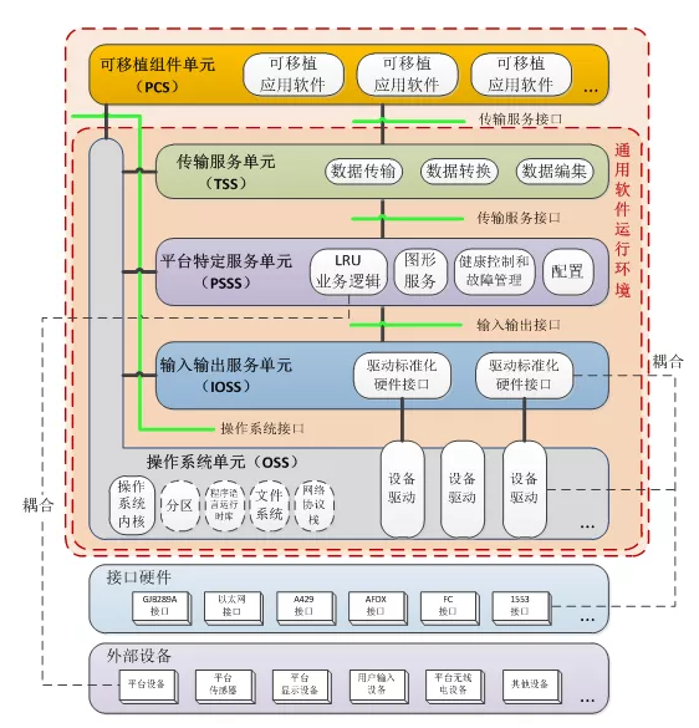
图6 FACE架构
美国空军发起了开放式任务系统计划,旨在开发一种非专有的开放式系统架构。OMS项目由来自政府、工业界和学术界成员组成,正在积极协调新兴OMS标准的制定,包括多个机载平台和传感器采集程序,以及无人机系统(UAS)指挥和控制计划(UCI)和通用任务控制中心(CMCC)。
OMS以及其他OSA工作的目标是确定新的采购和架构方法,以降低开发和生命周期成本,同时提供升级和扩展系统功能的可行途径。由美国空军开发的开放式任务系统(OMS)标准在其定义中利用商业开发的面向服务的体系结构(SOA)概念和中间件。空军正在寻求扩展OMS标准的能力,以促进航空电子系统的快速发展。UCS OMS参考架构建立了面向服务的基本设计模式和原则以及关键接口和模块。航空电子系统的功能被表征为一组服务和一组客户。在某些情况下,程序或系统可以是客户端和服务。OMS标准定义了客户端和服务的基本行为以及用于进入和退出系统的航空电子服务总线(ASB)协议,支持测试,容错,隔离和身份验证。
在SoSITE项目的最新试验中,使用了臭鼬工厂开发的复杂组织体开放式系统架构(E-OSA)任务计算机版本2(EMC2),即所谓的“爱因斯坦盒”,如图7所示。洛克希德·马丁公司开发的E-OSA兼容了美空军OMS标准。“爱因斯坦盒”可为系统之间的通信提供了安全保护功能,在将相关能力部署到操作系统之前,“爱因斯坦盒”能够确保快速而安全的实验。“爱因斯坦盒”不仅是一个通信网关,它可被比作一部智能手机,能够运行很多不同的应用程序,具备实现动态任务规划、ISR以及电子战的能力。
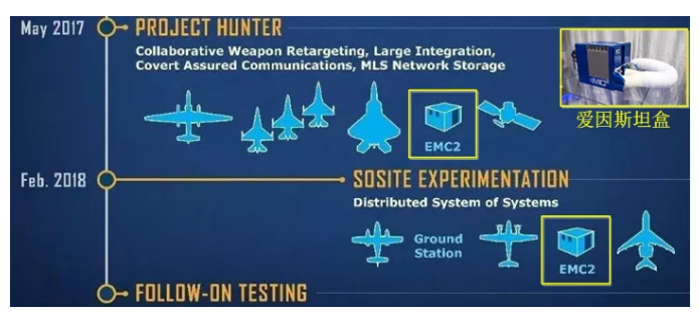
图7 使用EMC2的美军试验
2.2 无人机控制权限交接
不同无人机控制权限交接流程和交接指令差异较大,STANAG 4586通用控制标准目前并不涵盖无人机控制权限交接的指令,目前在无人机控制权限交接上缺乏统一的标准[4,5]。无人机控制权限交接指令主要分成:申请权限请求、释放权限请求、抢权请求、同意、不同意和确认等。
有人/无人机协同作战在控制权交接上可大致分成空地交接和空空交接两种模式。空中不同的有人机平台之间对无人机控制权限进行交接,主要发生在存在有人机加入和退出有人/无人机协同作战体系时,如有人机油料不足需要返航或者被敌方击中,需要将无人机控制权限交给其他有人机。有人机与地面控制站之间对无人机的控制权限进行交接,主要发生在执行任务前和任务完成后,无人机起降过程还需地面控制站作为主控方,另外当发现无人机出现异常情况,有人机操作不及时时,也需将无人机控制权限交给地面控制站。
2.3 协同任务分配和航路智能规划
针对有/无人平台编队协同作战任务过程中的任务自规划、航路自调整、目标自分配等要求和特点[6],利用战术驱动的任务自动分解与角色自主分配技术,在有人机上进行强实时战术驱动的任务自动解算与有人/无人平台角色智能化分配,自主生成多种可行的任务规划方案,为有人机操作人员选择最佳方案提供辅助决策支撑。
如图8所示,利用有人/无人协同航路临机规划技术,基于战场环境、作战态势和平台状态的航路在线自动计算与优化,提供多种航路规划方案。建立任务自主分配策略和辅助决策知识库、航路自规划与自适应飞行控制策略和辅助决策知识库,提高有/无人编队协同作战的自主化规划能力。
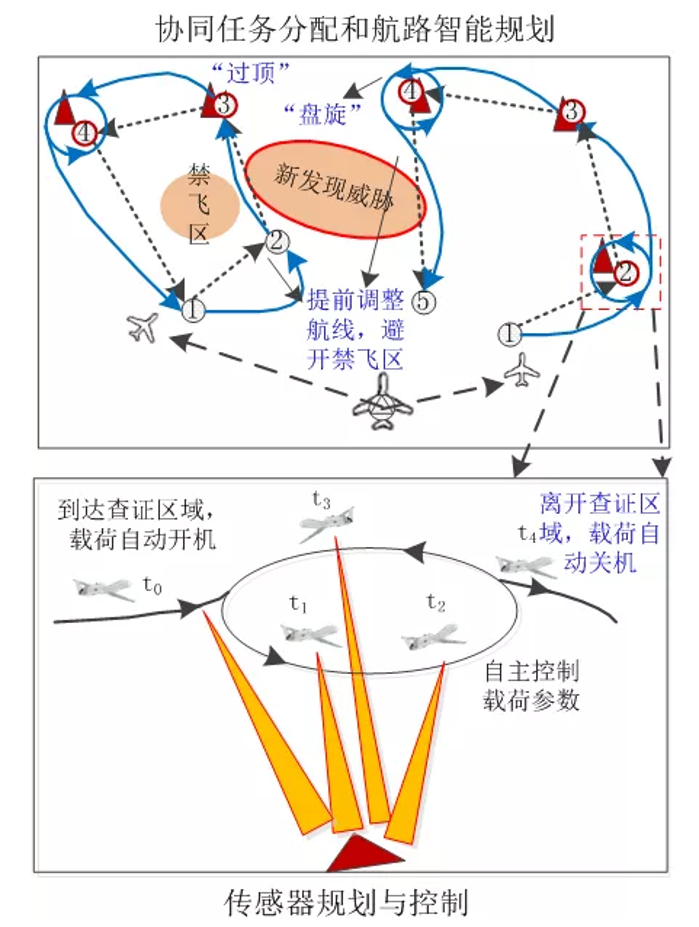
图8 协同任务分配和航路智能规划
2.4 综合识别和情报融合
针对不同的有人/无人协同作战任务,有人机和无人机携带的载荷类型差异较大,特别是无人机可携带的载荷包括雷达、可见光、红外、多光谱/超光谱、电子侦察等,通常情况下无人机同时携带多种类型载荷进行探测,多个无人机平台将会采集大量多源情报数据。为了提高远距离目标识别的置信度,增强态势感知、改善目标检测,提高精确定位,提高生存能力,不同平台多模态传感器情报的综合识别和融合将会是有人/无人协同的关键技术之一。目前,深度神经网络在图像/视频的目标检测和识别领域取得广泛的应用,比传统方法具有明显优势。借助人工智能技术,通过对多源情报数据进行综合识别和情报融合,形成战场统一态势信息,为决策过程提供快速、精确、可靠的依据。
3 典型作战场景和作战流程
以空中预警机为例,下面对有人/无人协同作战典型作战场景进行介绍。如图9所示,预警机实现有人/无人编队的指挥控制与引导,由预警机完成信息的综合处理、联合编队的战术决策、任务管理以及对无人机的指挥控制,由无人机完成自主飞行控制、战场态势感知以及对空/地/海目标的最终打击[7]。有人战机充当体系中的通信节点,将有人/无人作战编队嵌入到整个对抗体系中,从而实现战场的信息共享、可用资源的统一调度及作战任务的综合管理。
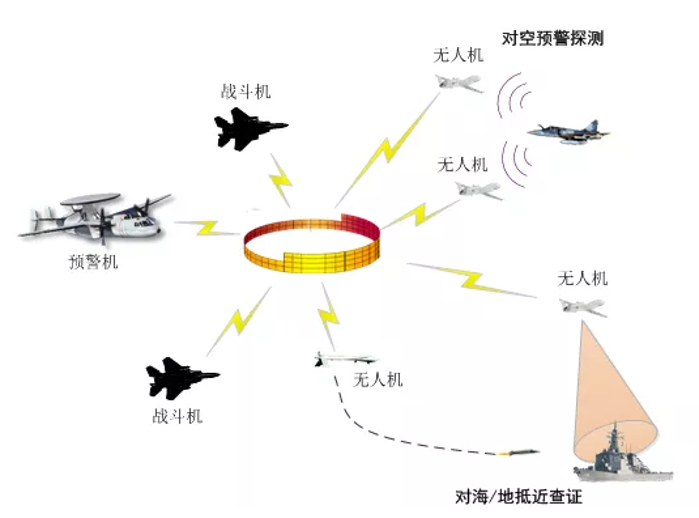
图9 有人/无人机协同典型作战场景
有人/无人机协同作战典型作战流程如图10所示,共分成任务准备阶段、任务执行阶段和任务结束阶段。
(1)任务准备阶段。
分别完成对有人机和无人机的任务/航路装订。有人机和无人机分别起飞,并飞至交接区域,无人机地面控制站将无人机的控制权限移交给有人机,在有人机的指挥下,共同飞往任务区域。
(2)任务执行阶段。
有人机根据当前战场态势信息,分配各个无人机的作战任务,并对无人机的航线和传感器进行规划。无人机在有人机的指挥下,按照规划结果执行飞行任务,抵达目标区域后,传感器开机。有人机上的操作人员对无人机传感器进行控制,无人机负责采集并回传目标情报至有人机。通过多源情报综合处理,形成新的态势信息,为有人机的进一步决策提供依据。
(3)任务结束阶段。
任务执行完成后,有人机指挥无人机抵达交接区域,有人机将无人机的控制权限移交给无人机地面控制站。有人机和无人机执行各自的任务或返航。

图10 有人/无人机协同典型作战流程
4.对有人/无人机协同领域发展的展望
有人/无人机协同作战是未来重要的发展方向,在对当前美军有人/无人协同项目和关键技术分析和理解的基础上,可预见未来该领域将会逐渐向以下方向发展。
(1)“即来即用”的大规模无人机控制
随着未来无人机自主能力不断提升,只在重大决策点需要人为介入,无人机操作人员控制的无人机数量将大幅提升。另外,人机交互的手段将越来越丰富,对无人机的控制效率将得到本质改善。有人机通过通用指令对不同型号、不同类型的无人机进行控制,无人机的技术体制和通信也能够全面兼容,实现有人/无人机协同作战体系中作战平台的无缝进入和离开。
(2)情报处理的智能化
针对不同平台、不同传感器采集的数据,通过更加智能化的手段,对目标进行精确检测、识别、跟踪,融合生成统一态势信息。
(3)更快、更低成本的体系能力集成
全面采用开放式体系架构,缩短有人/无人机协同作战能力集成周期和装备采购成本,同时将有人/无人机的协同作战快速扩展到与无人车、无人船和无人艇的协同,形成更全面的体系作战能力。
结 语
本文深入分析了近些年美军在有人/无人机协同领域的项目,提出了有人/无人机协同需要发展的关键技术,并对有人/无人机协同作战的典型作战场景和作战流程进行研究,最后对有人/无人机协同作战领域未来发展进行了展望,并分析了与网络信息体系的关系。
【参考文献】
[1] United States Department of Defense. Unmanned Systems Integrated Roadmap FY2017-2042. Report, 2018.
[2] 李磊,王彤,蒋琪. 美国CODE项目推进分布式协同作战发展[J]. 无人系统技术, 2018, (3): 63-70.
[3] 申超,李磊,吴洋,等. 美国空中有人/无人自主协同作战能力发展研究[J]. 战术导弹技术, 2018, (1): 22-27.
[4] STANAG 4586 Ed.3 Nov 2012, Standard Interfaces of UAV Control System (UCS for NATO UAV Interoperability, NATO Standardization Agency (NSA), 2012.
[5] Mário Monteiro Marques, STANAG 4586 –Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability.
[6] 杨帆,董正宏. 有人/无人平台协同技术与行动模式研究[J]. 国防科技, 2018, 39(4): 57-62.
[7] 孙晓闻. 无人/有人机协同探测/作战应用研究[J]. 中国电子科学研究院学报, 2014, 9(4): 5-8.
© 2019-2021 All rights reserved. 北京转创国际管理咨询有限公司 京ICP备19055770号-1
Beijing TransVenture International Management Consulting Co., Ltd.
地址:北京市大兴区新源大街25号院恒大未来城7号楼1102室
北京市丰台区南四环西路128号诺德中心2号楼5层
北京市海淀区西禅寺(华北项目部)
江苏省无锡市滨湖区蠡溪路859号2131室
深圳市南山区高新科技园南区R2-B栋4楼12室
深圳市福田区华能大厦
佛山顺德区北滘工业大道云创空间
汕头市龙湖区泰星路9号壹品湾三区
长沙市芙蓉区韶山北路139号文化大厦
梅州市丰顺县大润发大厦



欢迎来到本网站,请问有什么可以帮您?
稍后再说 现在咨询